Das Forschungsprojekt WATERSTEPCAR lief ca. 2011 bis 2013. Als Ziel galt es zum einen experimental das Mathematische Modell zu Verifizieren und damit zu beweisen, dass mehr als die Hälfte der Energie gespart werden kann, zum anderen, die Idee für eine praktische Anwendung mit dem experimental-Modell zu demonstrieren.
Das Waterstepcar-Modell II hat bewiesen, dass die Fortbewegung auf dem Wasser mittels der Schritte im Wasser (water steps) durchaus möglich und spannend ist.
Folgende Nachteile des Modells wurden festgestellt: Beim Leerlauf in der Luft wurde ein hoher Reibungsverlust im Mechanischen teil festgestellt. Der mechanische Reibungsverlust ist ein vielfaches der für die Bewegung im Wasser nach dem mathematischen Modell errechneten gesamt Energie. Das Modell II konnte nicht so weit gestellt werden, dass sie praktische Anwendung (einen Passagierschiff) darstellt, da das Maximalgewicht für die gewählte Auslegung der Karosserie schon durch die Karosserie selbst erreicht wurde. Als weiterer ist des Modells ist es anzumerken, dass die Wind-Angriffsfläche gegenüber dem Wasserhalt besonders Seitlich zu groß und nicht gegensteuerbar ist.
Im Anbetracht dessen, dass es aktuell keine realistische Anwendungen für einen großen einsatzfähigen Wasserschrittfahrzeug vorliegen, wurde die Forschung und Entwicklung eingestellt. Das Modell II ist jedoch noch in Teilen vorhanden und wird voraussichtlich bis 2025 gelagert. Es kann beim Bedarf innerhalb ca. einer Woche einsatzfähig gemacht werden. Die Projekt-Seite http://waterstepcar.de/ wird voraussichtlich auch bis 2025 erhalten.
Ich bedanke mich ganz herzlich bei allen, die mich bei dem Projekt Waterstepcar unterstützt haben!
(2021-07-11, Dmitrij Kopanev)
Modelle
Waterstepcar Modell I

Waterstepcar Modell II

Theorie
Water Step Car – Amphibisches lineares Schrittraupenfahrzeug mit invertiertem Schienenfahrzeug-PrinzipDas Fahrzeug hat einen innovativen verteilten Rumpf. Nach dem mathematischen Modell wird bei dem Water Step Car Fahrzeug gegenüber einem Schiff mit herkömmlichen Rumpf bei gleichem Gewicht und gleicher Geschwindigkeit mehr als die Hälfe der Energie gespart.
Das Grundprinzip des Fahrzeugs wurde bereits im Herbst 2011 mit einem einfachen Modell verifiziert. Darauf folgte die Patentanmeldung und Einwicklung eines vereinfachten mathematischen Modells. Aktuelles Ziel ist die Verifizierung und Verbesserung des Mathematischen Modells anhand experimentellen Messung. Dazu wird aktuell an einem maßstabsgerechten Modell des Amphibienfahrzeugs gearbeitet.
Kurzbeschreibung
Bei der Fahrt eines Rumpfbootes wird ein durchgehendes Spur hinterlassen. Auch die Reibung zwischen dem Rumpf und dem Wasser entsteht.
Für schnellere Geschwindigkeiten mit minimalem Energieverbrauch müssen diese zwei Widerstände minimiert werden.
Das Lineare Schrittfahrzeug verringert diese Widerstände. Beim linearen Schrittfahrzeug werden die Stützvorrichtungen in einem gleichmäßigen Abstand in einer Linie entlang der Bahnkurve auf der Fahrbahn platziert.
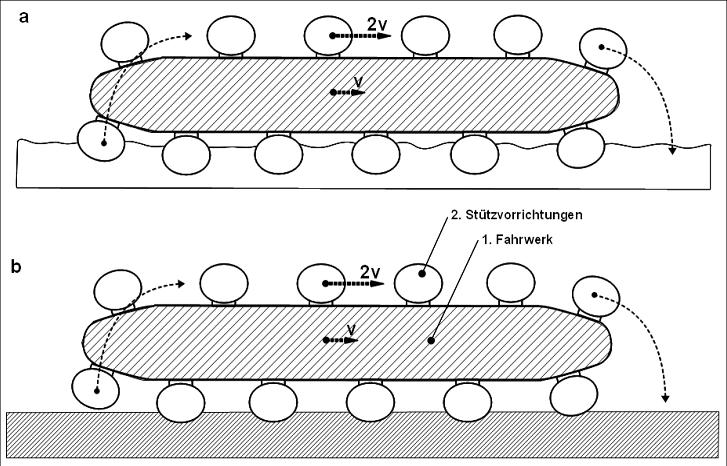
Eine Schrittraupe ist eine technische Lösung für ein lineares Schrittfahrzeug. Um ein Ketten-Laufwerk-artiges Fahrwerk gleiten mehrere gleichmäßig verteilte Stützvorrichtungen.
Bei einer schwimmfähigen Schrittraupe dienen die Stützvorrichtungen gleichzeitig als Schwimmkörper und tragen das Gesamtgewicht des Fahrzeugs auch im Wasser (Abb. 2a).
Die Stützvorrichtungen (2) rollen um das mit Schienen ausgerüsteten Fahrwerk (1): invertierter Schienenfahrzeug-Prinzip. Die Bewegung der Stützvorrichtungen erfolgt mit Seil- oder Kettenantrieb. Die Lenkung einer Schrittraupe wird durch die Seitenverschiebung von Stützvorrichtungen realisiert.
Ein Schrittraupenfahrzeug wird mit zwei parallel platzierten Schrittraupen ausgerüstet.
Lineare Schrittraupenfahrzeuge mit invertiertem Schienenfahrzeug-Prinzip können ihre
Anwendung als schnelle oder kraftstoffsparende Wasserfahrzeuge und als amphibische Fahrzeuge finden.
Unterlagen
Patentanmeldung am 13.10.2011
Mathematisches Modell
Berechnung für das mathematische Modell